Education
Soft Robotics
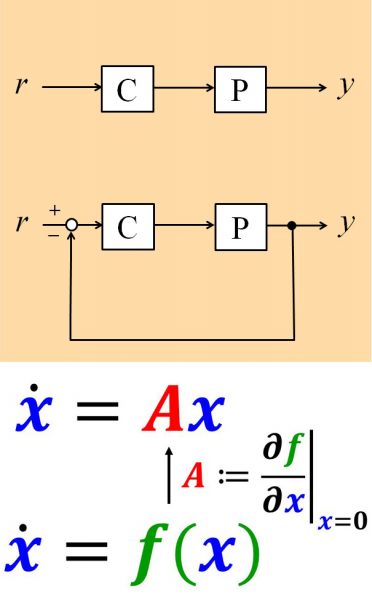
ソフトロボット学入門 基本構成と柔軟物体の数理
ソフトロボットの基本素材である弾性ロッドの変形の数理を担当。 英語版教科書もSpringerから出版予定。Soft Haptics

触覚認識メカニズムと応用技術-触覚センサ・触覚ディスプレイ-【増補版】
第2章第1節「触の錯覚:基礎編」を担当。触覚の錯覚を体験できる具体例を紹介。
狙いどおりの触覚・触感をつくる技術
第2章第8節「誰も知らない好感触をつくる」を担当。自動車の内装に実装されているソフトフィール素材のデザイン事例を紹介。
感覚重視型技術の最前線-心地良さと意外性を生み出す技術-
第5章「触覚ではかる」を担当。自動車ボディの面歪検査で行われている、微小面歪を触覚ではかる具体例にスポットを当て、ソフトロボティクスで注目されている形態計算の話題も盛り込んで、触覚ではかる計測技術について解説。