Research
Robotic Jerboa : 急旋回能力を有する小型滑走移動ロボット
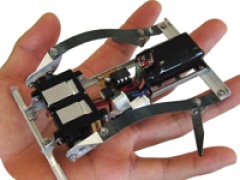
In this paper, we propose the robotic jerboa which is a compact bipedal kick-and-slide robot realizing quick turnings powered by unidirectional impulse force generators. The robotic jerboa moves fast not only running forward but also turning right and left. The robotic jerboa turns toward clockwise direction or counterclockwise direction obtaining turning moments by kicking to the ground with the right or the left leg. The robotic jerboa is composed as its legs are protruded out of the side of its body respectively in order to gain large turning moments. We show that the palm-top size robotic jerboa whose weight is of only 70[g] achieves the velocity of 1.5[m/s] and the turning angular velocity of 11.5[rad/s] instantaneously.